Relative Bricklaying Robot Simulations (2018)
This project explores the automated assembly of brick masonry using ‘relative robotics’ – where a construction robot can move relative to the object it is assembling. Digital simulations in Unity allowed the prototype to be tested on a variety of larger structures, using a custom control software to calculate additional structures, pathfinding and required actions.
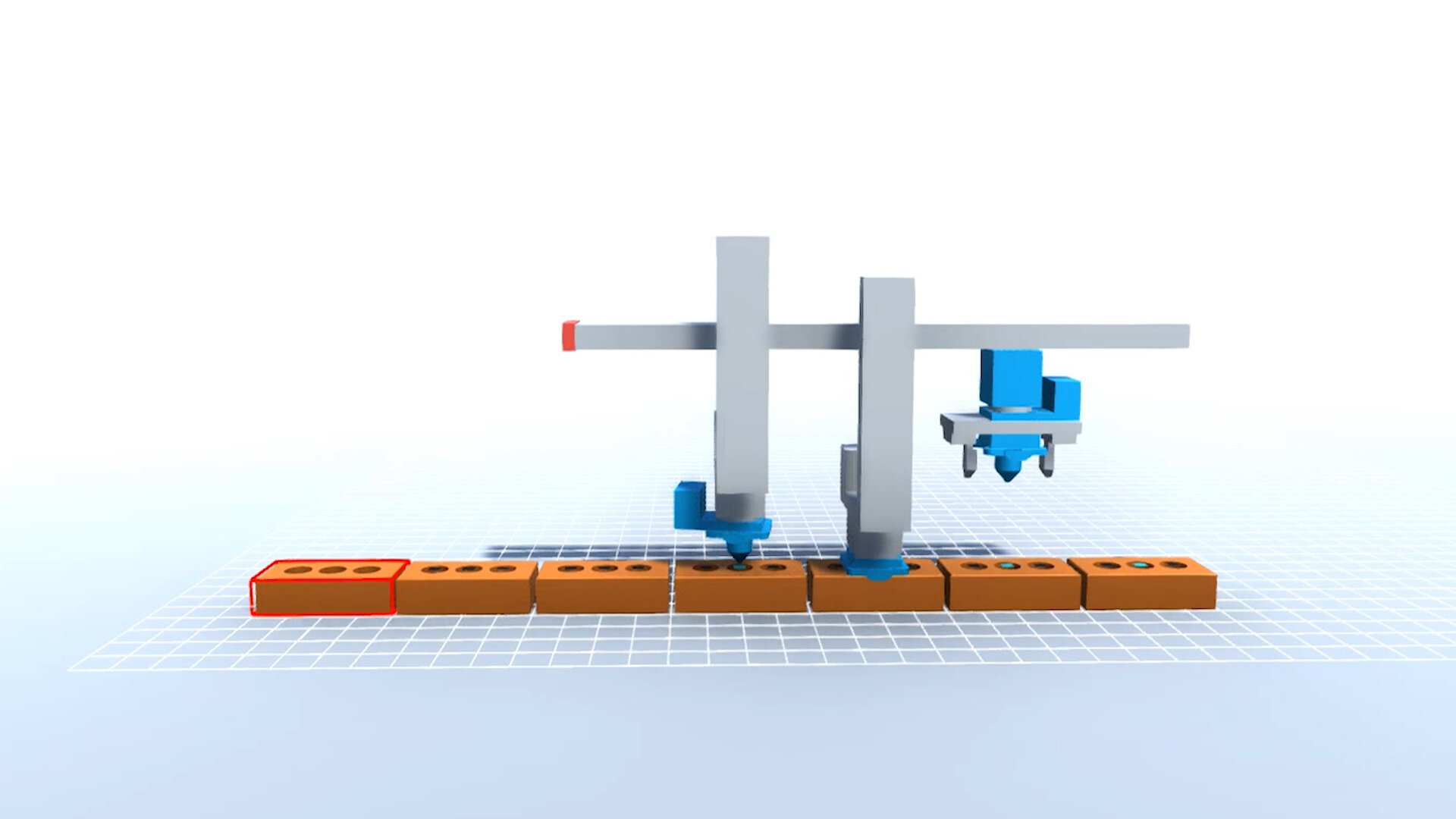
Video: Simple Stepping
Video: Brick Placement
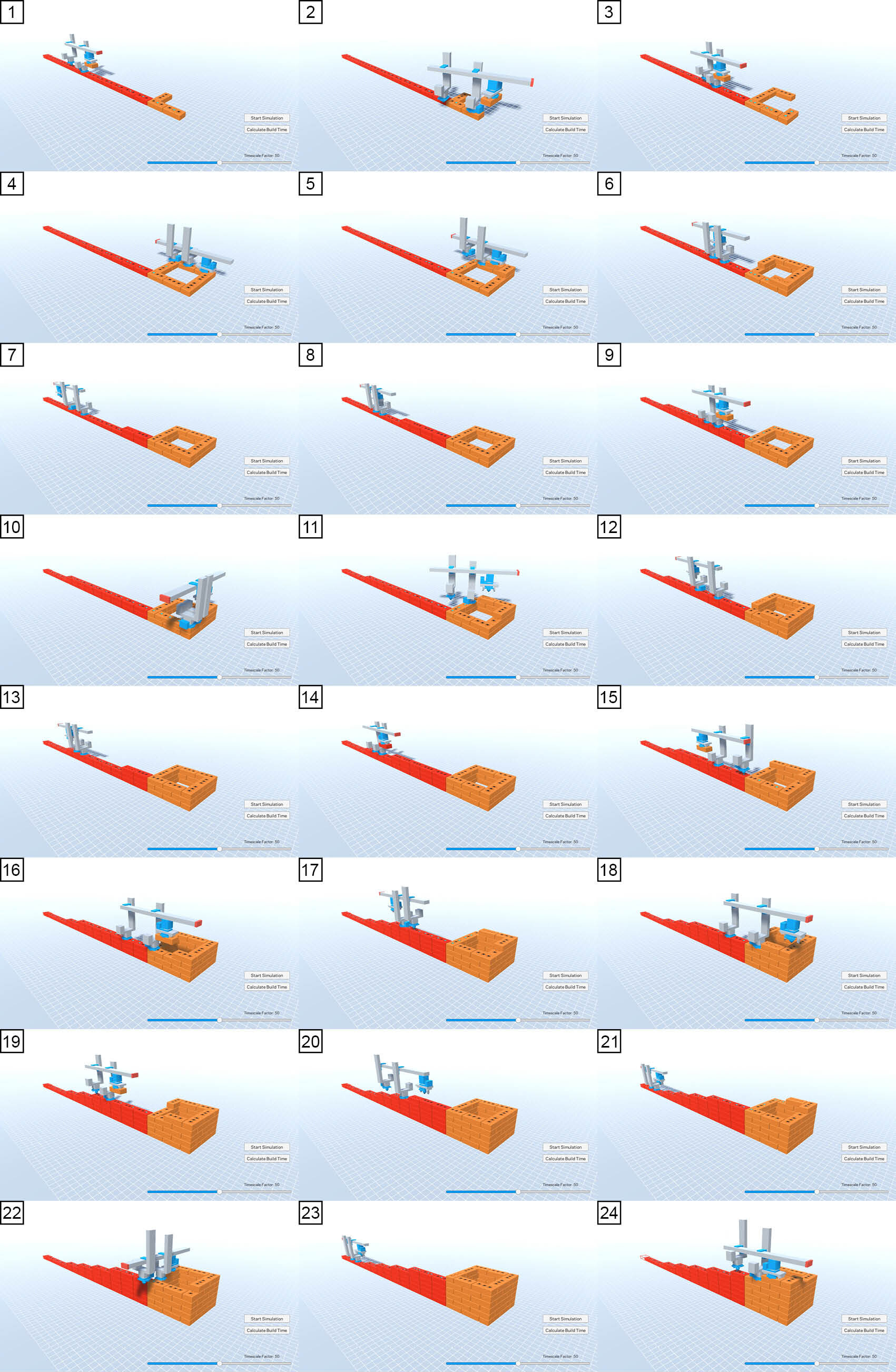
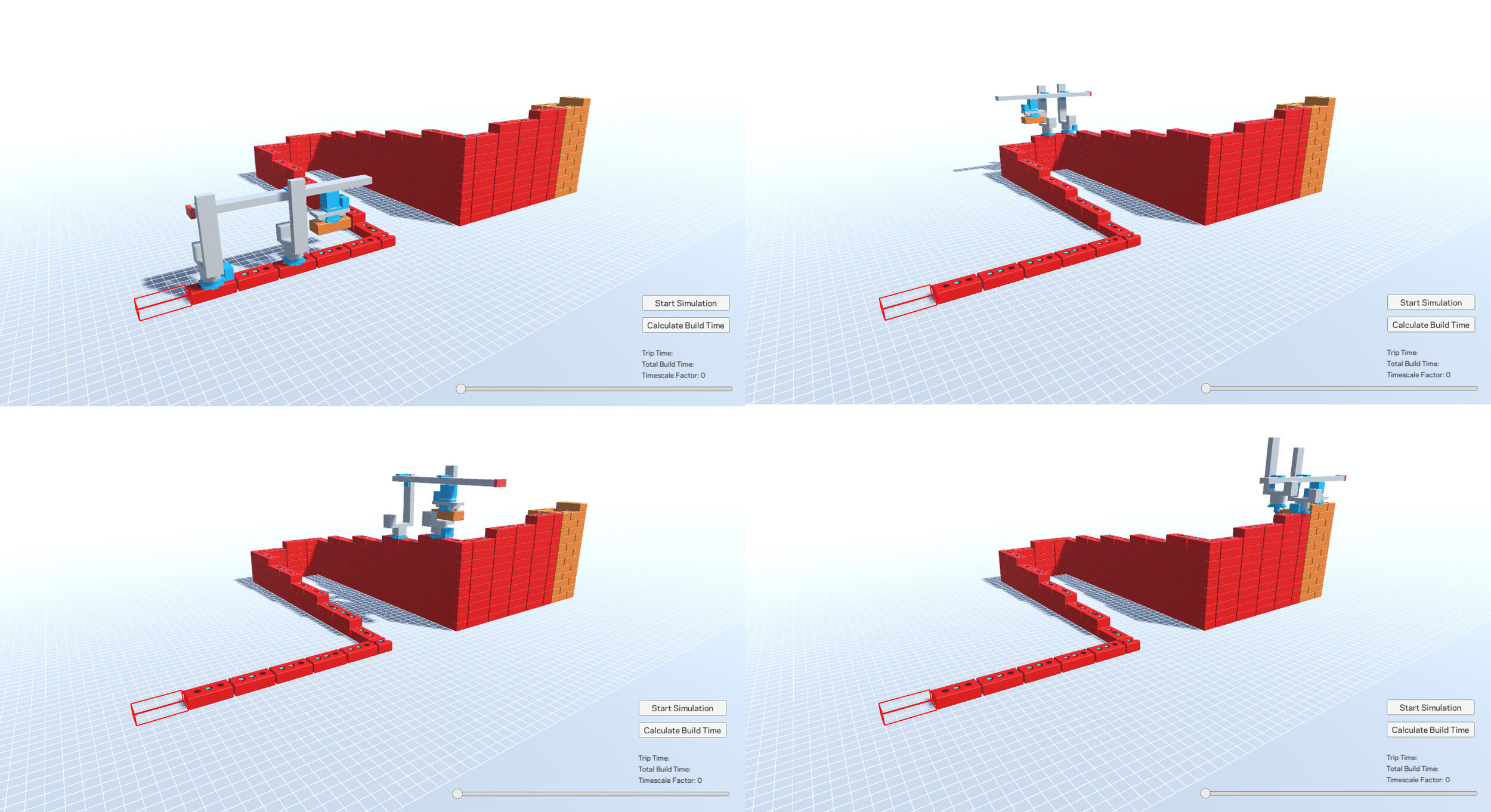
Video: Full Build Simulations