Mind Palace Research (2020)
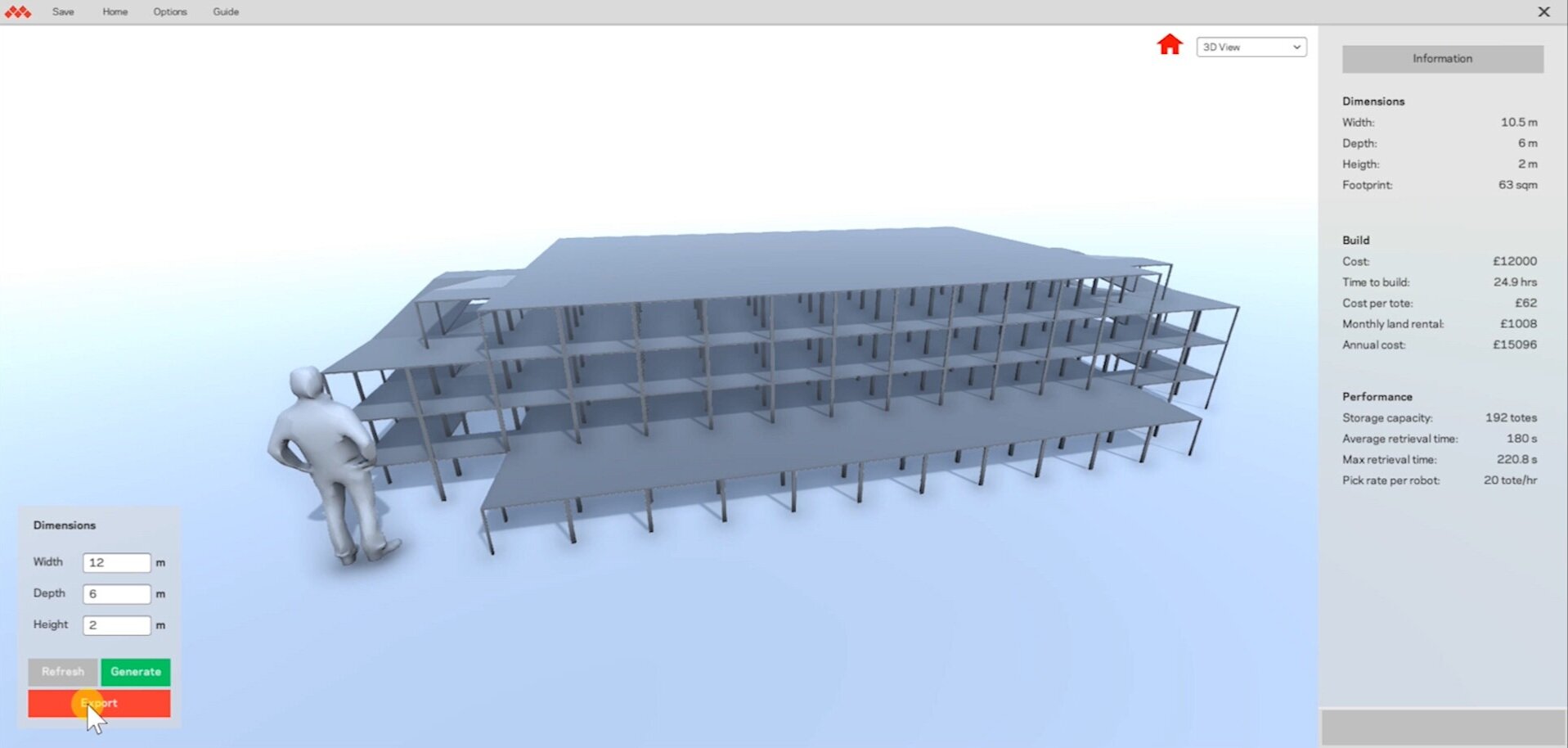
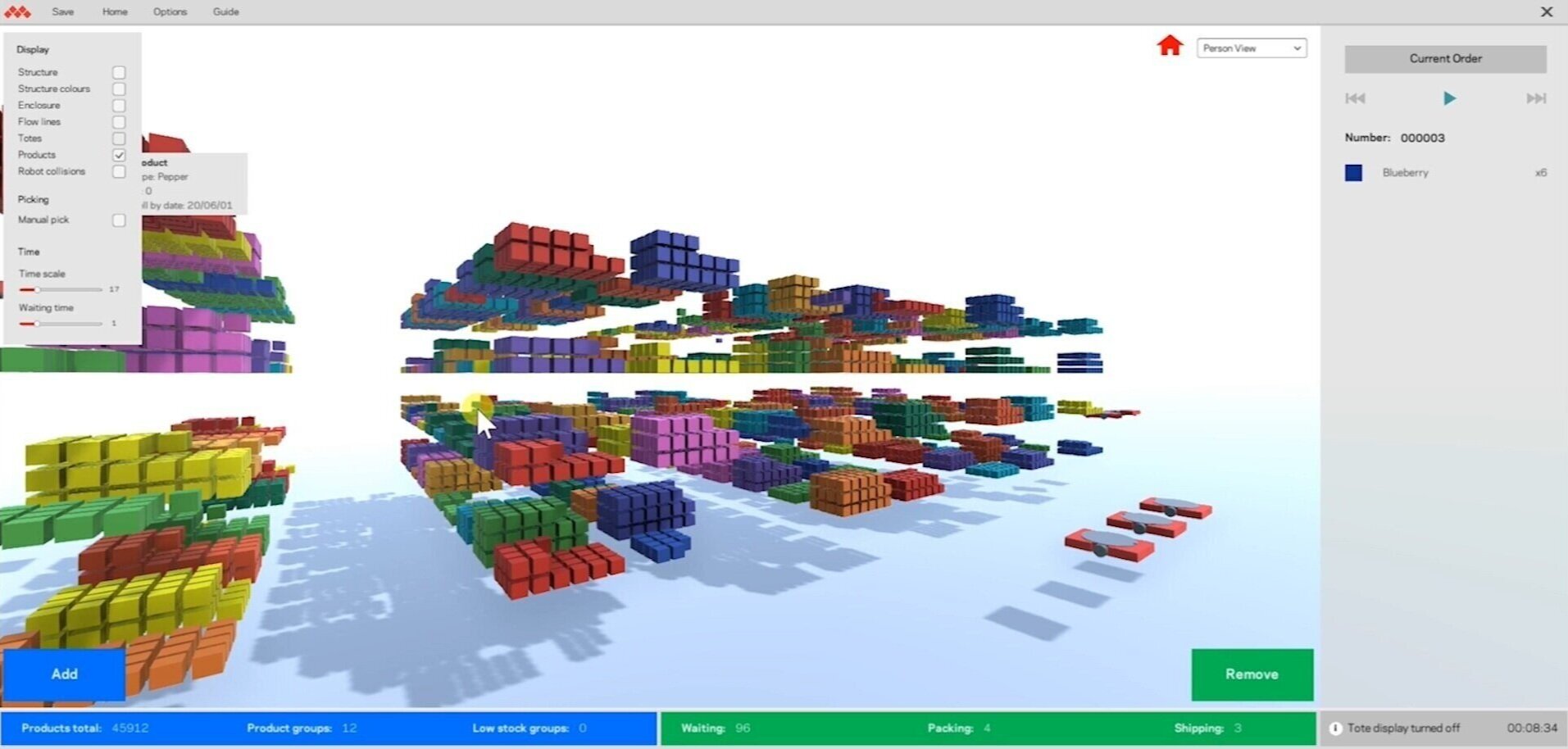
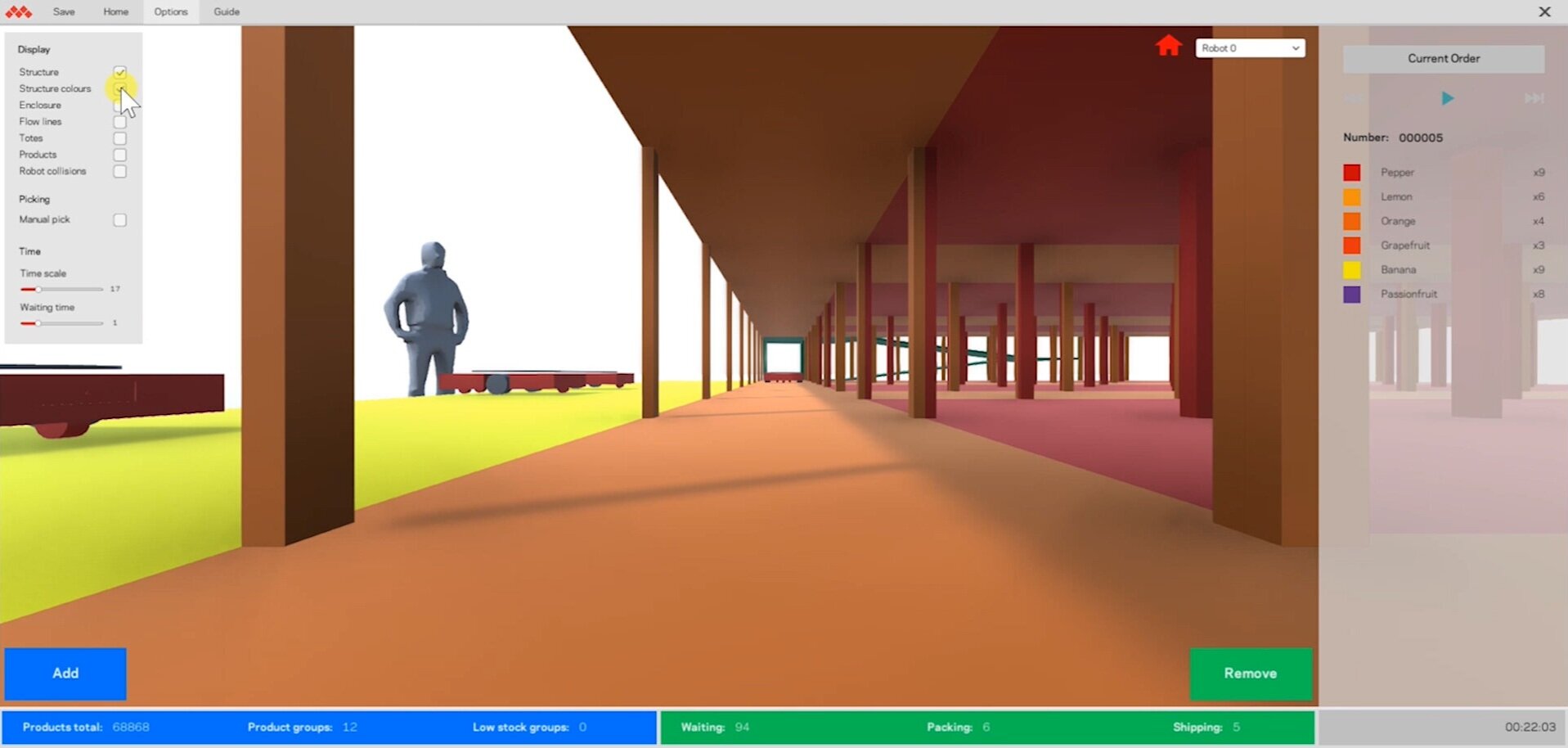
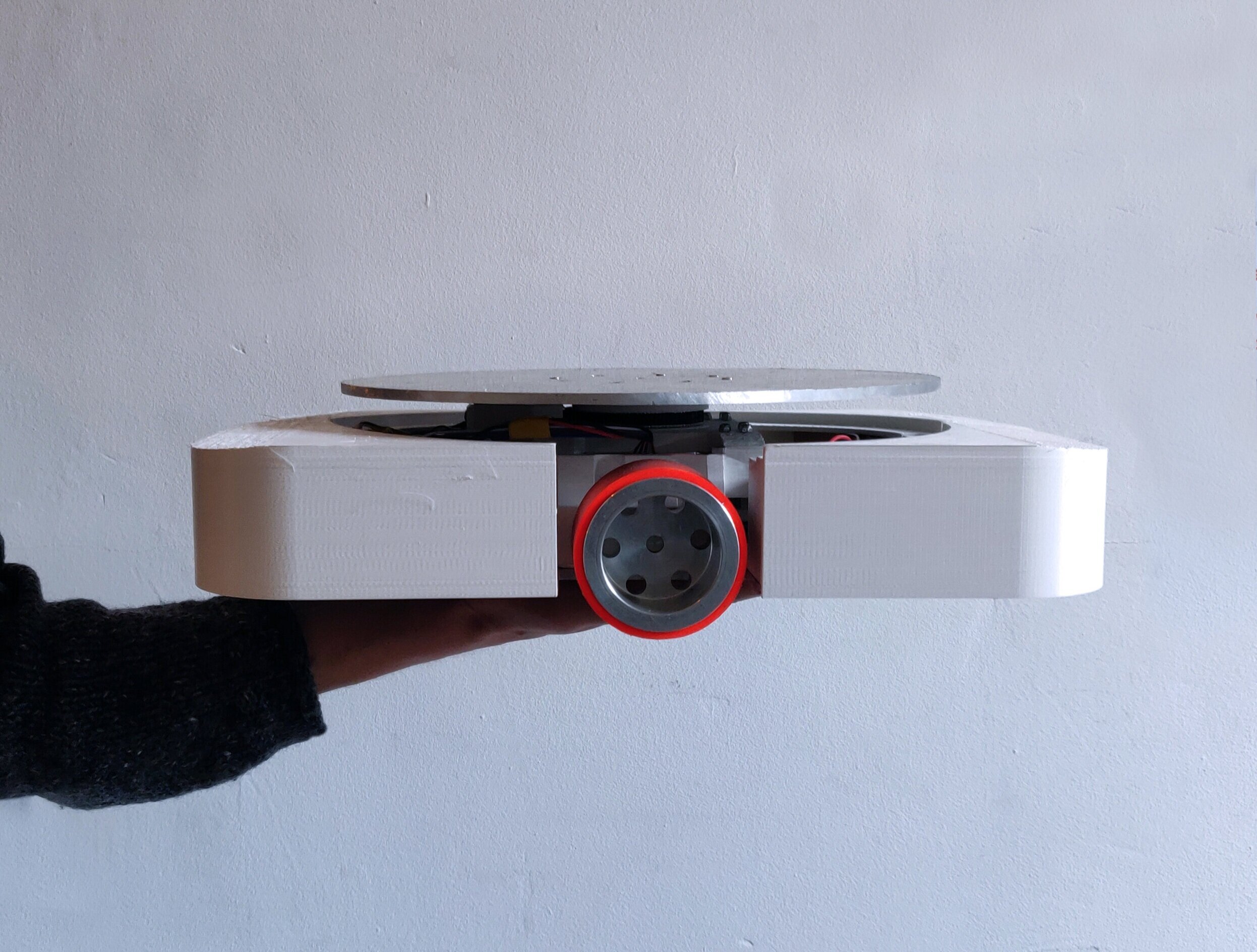
Short research project to test the feasibility of an alternative micro-fulfilment robotic storage and retrieval system. Shelving units arranged into a fixed array with access ramps or lifts located at various points throughout the structure. Storage totes raised on short legs allow a low-profile robot to manoeuvre under and move the totes around, whether to retrieval areas or to alternative storage locations. The system is a middle ground between large-scale ‘AMR/Kiva-type’ and ‘cube Automated Storage & Retrieval Systems’. It works at a very small scale and only requires one type of robot.
Video: Simulation software demo